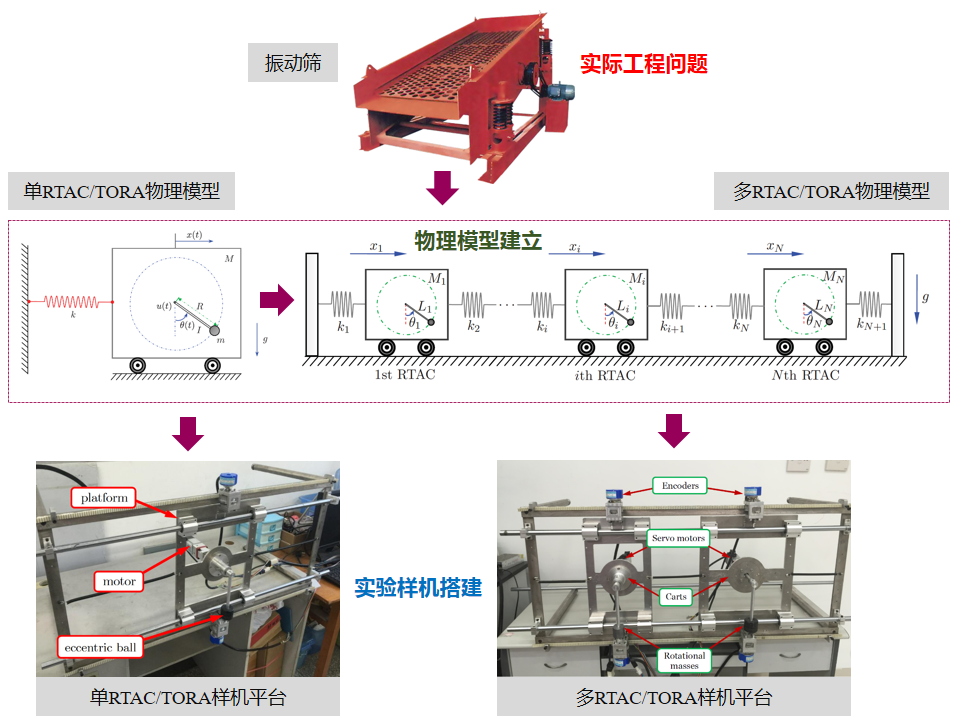
欠驱动RTAC/TORA系统是一种典型的欠驱动系统,由可驱动的旋转转子与不可驱动的、做平移运动的定位平台组成,可用于研究振动筛等大型机械设备的工作原理,同时也可用于分析振动系统自同步现象。该系统的各状态相互耦合,表现出很强的非线性特性,给其控制方法设计与稳定性分析带来了很大的挑战。
研究成果
- 搭建了2套实验样机平台,提出了多种行之有效的非线性控制方法
- 在IEEE Transactions上发表高水平学术论文3篇
- 获第十五届“挑战杯”全国大学生课外学术科技作品竞赛一等奖
- 部分实验结果见下面视频
实验视频
https://www.bilibili.com/video/av24520888/
代表性论文
- Y. Wu, N. Sun, et al., An increased nonlinear coupling motion controller for underactuated multi-TORA systems: Theoretical design and hardware experimentation, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019年. (SCI一区,中科院TOP) [入选ESI高被引论文]
- N. Sun, et al., Nonlinear continuous global stabilization control for underactuated RTAC systems: Design, analysis, and experimentation, IEEE/ASME Transactions on Mechatronics, 2017年. (SCI二区,中科院top) [入选ESI高被引论文]
- N. Sun, et al., Nonlinear stabilization control of multiple-RTAC systems subject to amplitude-restricted actuating torques using only angular position feedback, IEEE Transactions on Industrial Electronics, 2017年. (SCI一区,中科院TOP)