海上吊车一般指负载吊运过程位于海面之上,主要用于舰船间货物的运输转移等。与陆地吊车等类似,海上吊车在运输过程中,需要解决由于意外碰撞等引起的负载摆动的抑制问题。此外,由于吊车安装于船体之上,而船体本身受到海浪、海流的影响会产生多个自由度的平动与转动,进而严重影响负载的运输与定位,因此,在控制过程中必须对船身的运动进行有效补偿。船体运动导致的负载扰动通常远大于意外碰撞的影响,且导致整个系统工作在非惯性系,给控制方法设计及分析带来了巨大挑战。
研究挑战
- 欠驱动、非线性、耦合性:类似陆上各种欠驱动吊车设备,需要控制负载运输过程中产生的摆动,保证其定位精度与运输效率。
- 强干扰、不确定性:由于吊车固定于船舶等运动平台上,平台本身的运动会对负载运动产生强烈的影响,且很多情况下,负载起吊与降落点处的运动情况与吊车本身的运动不一致。具体而言,在工作过程中,吊车船与接收船会随海浪纵摇、横摇与升沉,这些运动将导致负载发生摆动;特别是在升降过程中,船舶的此类运动易导致已吊起的负载再次与甲板相撞,或使已放下但尚未脱离吊钩的负载再次悬空,这些都会威胁作业的安全。尤其在进行舰船间弹药补给时,这种耦合运动可能造成非常严重的后果。
研究成果
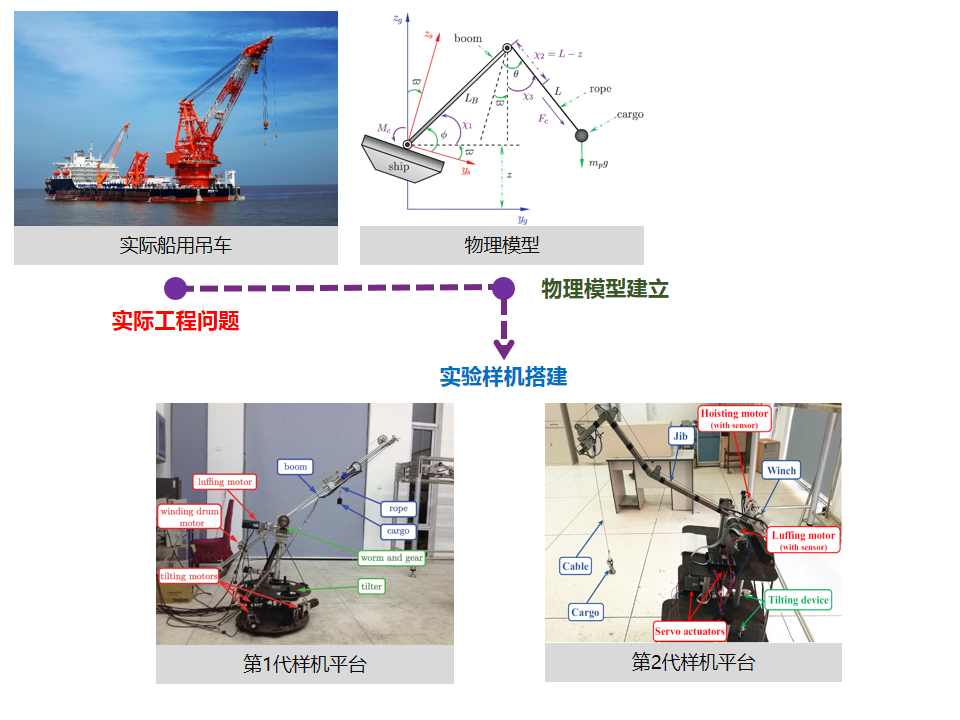
- 建立了塔式吊车系统的非线性完整动力学模型,并搭建了2套实验样机平台
- 提出了若干种行之有效的控制策略,可有效抑制船体运动干扰,且在参数不确定等情况下,能实现负载的精准、快速定位。根据相关结果发表了数篇IEEE Transactions论文,授权发明专利多项
实验视频
https://www.bilibili.com/video/BV1vN411Z74x/
代表性论文
- T. Yang, N. Sun, et al., Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones, IEEE Transactions on Neural Networks and Learning Systems, 2020年. (SCI一区,中科院TOP,人工智能领域的顶级学术期刊) [同时入选ESI热点+高被引论文]
- N. Sun, et al. Nonlinear stabilizing control for ship-mounted cranes with ship roll and heave movements: Design, analysis, and experiments, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018年. (SCI一区,中科院top) [入选ESI高被引论文]
- N. Sun, et al., Nonlinear antiswing control of offshore cranes with unknown parameters and persistent ship-induced perturbations: Theoretical design and hardware experiments, IEEE Transactions on Industrial Electronics, 2018年. (SCI一区,中科院top)
- N. Sun, et al., Dynamic feedback antiswing control of shipboard cranes without velocity measurement: Theory and hardware experiments, IEEE Transactions on Industrial Informatics, 2019年. (SCI一区,中科院top)
- N. Sun, et al., Nonlinear stable transportation control for double-pendulum shipboard cranes with ship-motion-induced disturbances, IEEE Transactions on Industrial Electronics, 2019年. (SCI一区,中科院top)
- Y. Fang, P. Wang, N. Sun, et al., Dynamics analysis and nonlinear control of an offshore boom crane, IEEE Transactions on Industrial Electronics, 2014年. (SCI一区,中科院top)
- T. Yang, N. Sun, et al., Swing Suppression and Accurate Positioning Control for Underactuated Offshore Crane Systems Suffering From Disturbances, IEEE/CAA Journal of Automatica Sinica, 2020年. (Q1区,自动化/计算机领域中国英文期刊中排名第1)
专利成果
- 方勇纯,卢彪,王翔宇,孙宁,船用起重机自动控制实验系统,中国发明专利,专利号:ZL201710059331.6,授权,授权日:2019.3.5。
- 孙宁,陈鹤,方勇纯,吴易鸣,考虑持续干扰与参数不确定性的船用吊车控制方法,中国发明专利,专利号:ZL201710259672.8,授权,授权日:2018.7.20。
- 孙宁, 杨桐, 陈鹤, 方勇纯, 欠驱动船用吊车有限时间内定位控制方法、装置及系统,中国发明专利,专利号:201810400807.2,授权,授权日:2019.5.17。
- 孙宁,杨桐,陈鹤,方勇纯,基于状态观测的船用吊车消摆定位控制方法和系统,中国发明专利,专利号:201810399899.7,授权,授权日:2020.6.30