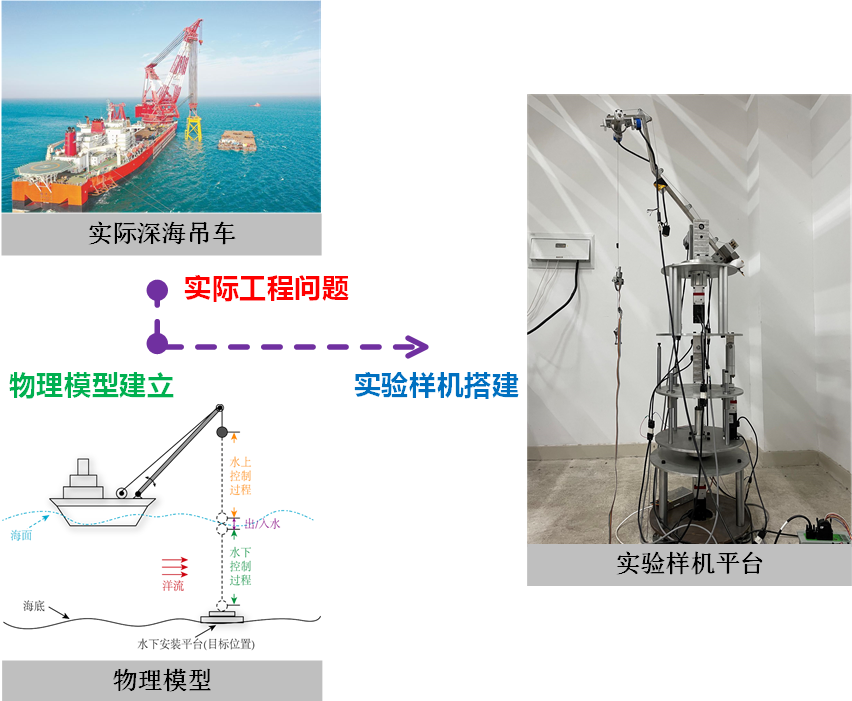
近年来,在我国“海洋强国”战略、“陆海统筹”规划等指引下,深海资源的开采与利用备受瞩目,而深海吊车是作业过程中不可或缺的吊运设备。与海上吊车类似,深海吊车也安装于受海浪、洋流等影响的船体上,但其吊运负载一般位于海面以下、具体深度不等。这样一来,负载振动不仅受船体运动的影响,还因处于水中而使振动幅度被放大、更为敏感,同时也增加了负载的柔性特性。因此,深海吊车的动力学模型更为复杂,负载的振动也更加难以抑制。
研究挑战
- 欠驱动、非线性、耦合性:系统不仅处于非惯性系,台车的大范围空间运动、水作用力影响等都会使动力学更复杂,状态量间耦合性更强。
- 分布质量系统:特殊的吊运环境(水中)赋予了负载或缆索一定的柔性特性,从而引入偏微分项,增大分析难度。
- 强干扰、不确定性:吊车本体的干扰运动、海面对船体的扰动、海面以下对负载的扰动等导致系统存在未建模动态以及各种不确定干扰,进一步增加了控制难度。
研究成果
- 分析深海吊车复杂的动力学模型,搭建了实验样机平台
- 在轨迹规划、智能控制等方面提出了若干种方法,有效抑制了负载振动。相关成果发表于SCI、自动化学报等期刊上
代表性论文
- Y. Wang, N. Sun, et al., Point-to-point motion control for flexible crane systems working in the deep sea, Measurement and Control, 2020年.
- 王岳, 孙宁, 等. 深海起重机系统的实时轨迹规划方法. 自动化学报, 2020年.