相比于桥式吊车,塔式吊车包含旋臂的旋转运动,且其工作环境更为恶劣(高空、强干扰等)。旋转运动更容易激发负载在空间内的摆动,因此塔吊具有更加复杂的欠驱动特性、更强的非线性,且系统状态之间具有更强的耦合性。在这种情况下,非常难以实现负载的快速精准定位与消摆。然而,塔身高、回转半径大等特点,又使得塔式吊车的工作空间广、垂直作业效率高,更加适用于高层建筑的建设与修缮,这使其成为建筑业不可或缺的关键设备之一。因此,如何实现塔式吊车的高性能制动控制,具有非常重要的实际应用价值与意义。
研究挑战
相比于桥式吊车,塔式吊车包含旋臂的旋转运动,且其工作环境更为恶劣(高空、强干扰等)。旋转运动更容易激发负载在空间内的摆动,因此塔吊具有更加复杂的欠驱动特性、更强的非线性,且系统状态之间具有更强的耦合性。在这种情况下,非常难以实现负载的快速精准定位与消摆。
研究成果
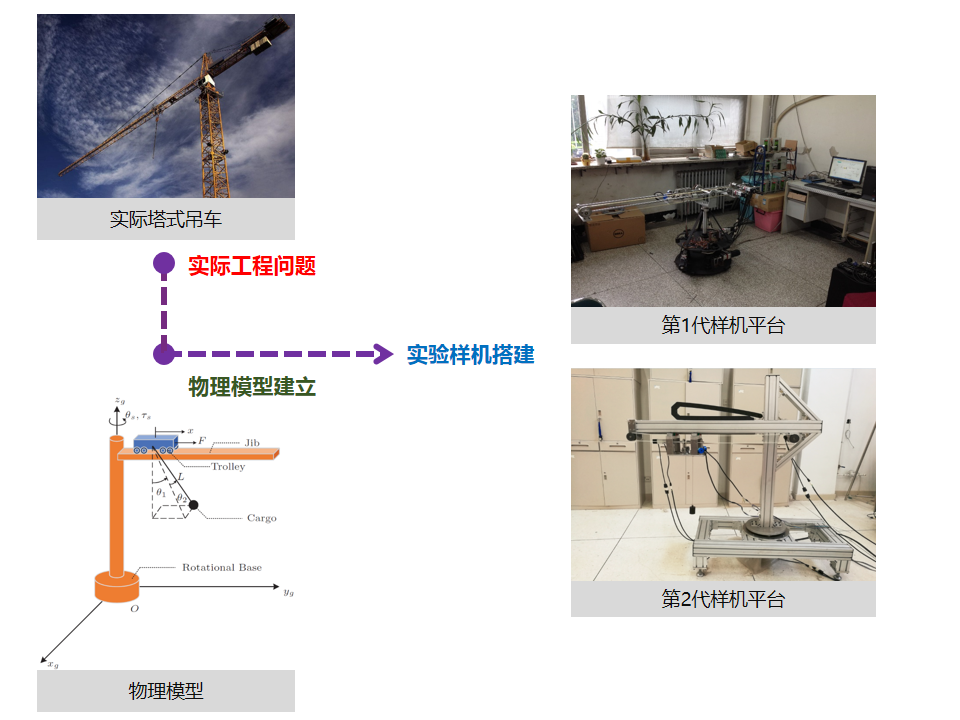
- 从工程角度出发,通过问题提炼,建立了塔式吊车系统的非线性完整动力学模型,并搭建了实验样机平台
- 考虑多种实际因素,在运动规划、非线性控制方面提出了若干种方法,可以同时实现快速定位与消摆等控制目标,提升了系统的控制性能。相关结果发表于IEEE Transactions等高水平期刊上
实验视频
https://www.bilibili.com/video/av24521740/
代表性论文
- N. Sun, et al., Slew/translation positioning and swing suppression for 4-DOF tower cranes with parametric uncertainties: Design and hardware experimentation, IEEE Transactions on Industrial Electronics, 2016年. (SCI一区,中科院TOP)
- Y. Wu, N. Sun, et al., Adaptive output feedback control for 5-DOF varying-cable-length tower cranes with cargo mass estimation, IEEE Transactions on Industrial Informatics, 2021年. (SCI一区,中科院top)
- T. Yang, N. Sun, et al., Observer-based nonlinear control for tower cranes suffering from uncertain friction and actuator constraints with experimental verification, IEEE Transactions on Industrial Electronics, 2020年. (SCI一区,中科院TOP)
- H. Chen, Y. Fang, N. Sun, An adaptive tracking control method with swing suppression for 4-DOF tower crane systems, Mechanical Systems and Signal Processing, 2019年. (SCI一区,中科院TOP)
- N. Sun, et al., Antiswing cargo transportation of underactuated tower crane systems by a nonlinear controller embedded with an integral term, IEEE Transactions on Automation Science and Engineering, 2019年. (SCI二区)
- Z. Liu, T. Yang, N. Sun, et al., An antiswing trajectory planning method with state constraints for 4-DOF tower cranes: Design and experiments, IEEE Access, 2019年. (SCI二区)