相比桥式吊车,桅杆式吊车体积相对较小,既可以加载于车辆上,又可以固定于地面,具有较强的灵活性和更少的能耗,应用场景更加广泛。吊杆可以完成俯仰及旋转两个方向上的转动,在保证有限占地面积的同时极大地扩展了作业空间,提高了工作效率。
然而,桅杆式吊车状态量之间存在着非常强的耦合特性,同时涉及俯仰和旋转运动,会产生复杂的离心力,导致其动力学方程十分复杂,呈现出高度的非线性和耦合性,进一步增加了控制的难度。
研究挑战
相比桥式吊车,桅杆式吊车状态量之间存在着更强的耦合特性,同时涉及俯仰和旋转运动,会产生复杂的离心力,导致其动力学方程十分复杂,呈现出高度的非线性和耦合性,进一步增加了控制的难度。
研究成果
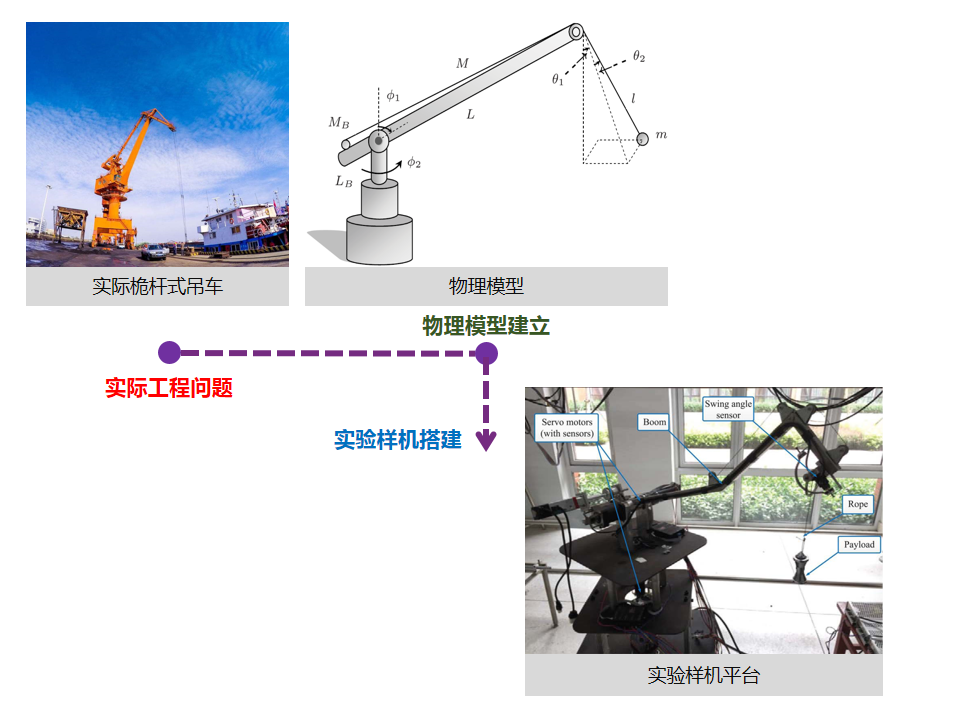
- 从工程角度出发,通过问题提炼,建立了桅杆式吊车系统的非线性完整动力学模型,并搭建了实验样机平台
- 在运动规划、非线性控制方面提出了若干种方法,大幅提高了系统的工作效率,在此基础上,发表了3篇IEEE Transactions论文
代表性论文
- N. Sun, T. Yang, et al., Adaptive anti-swing and positioning control for 4-DOF rotary cranes with parametric uncertainties: Design and experiments, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019年. (SCI一区,中科院TOP) [同时入选ESI热点+高被引论文]
- T. Yang, N. Sun, et al., Motion trajectory-based transportation control for 3-D rotary cranes: Analysis, design, and experiments, IEEE Transactions on Industrial Electronics, 2019年. (SCI一区,中科院TOP)
- N. Sun, T. Yang, et al., Nonlinear motion control of underactuated 3-dimensional boom crane systems with hardware experiments, IEEE Transactions on Industrial Informatics, 2019年. (SCI一区,中科院TOP)
- N. Sun, T. Yang, et al., An antiswing positioning controller for rotary cranes, IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, 2017年
专利成果
- 孙宁,杨桐,陈鹤,钱彧哲,方勇纯,中国发明专利,欠驱动桅杆式起重机定位消摆非线性控制方法,专利号:201710300394.6,授权,授权日:2019.12.3