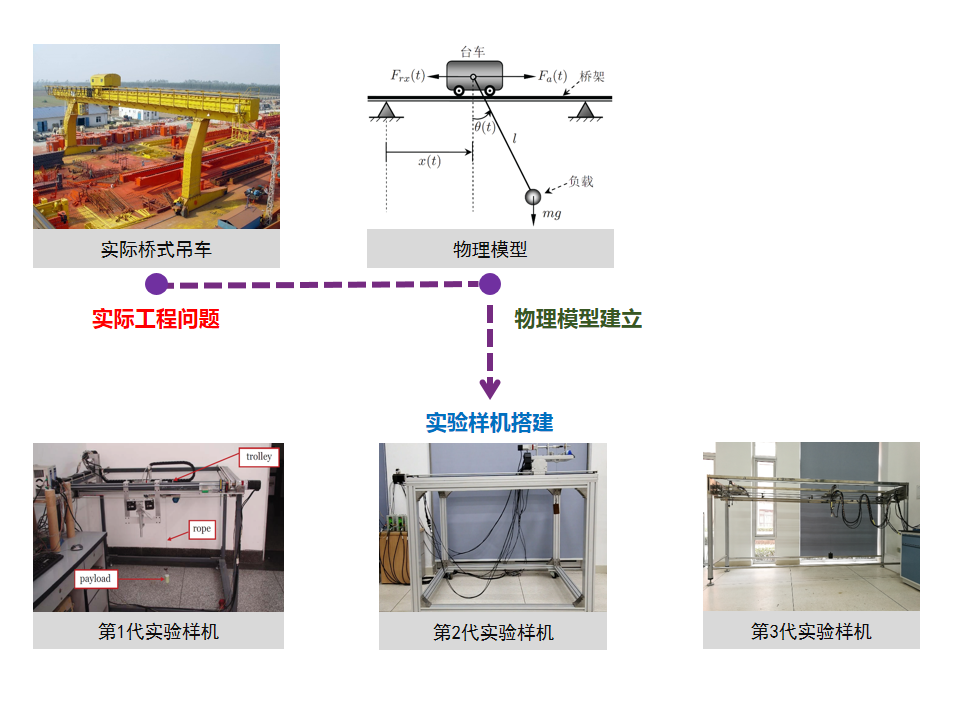
在各类吊车中,桥式吊车最具代表性,应用也最为广泛。对于吊车系统而言,其所面临的最大问题在于台车运动及外界干扰(如风力等)引发的负载摆动,这不仅会降低整体的效率,影响负载在落吊过程中的精确放置操作,还可能引发碰撞而造成安全事故。在一些特殊的场合,如钢水包搬运,甚至期望能实现“无摆”运送,以防止高温钢水溢溅。
研究挑战
- 欠驱动特性,即控制输入个数少于系统自由度个数。仅能操纵台车的水平运动和负载的升/落吊运动,而无法直接对负载的空间摆动施加控制。如何实现以“少”控“多”,是控制方法设计的最根本的需求。
- 非线性、强耦合。吊车系统的各状态之间相互耦合,台车的水平运动及吊绳的伸缩会不可避免地引发负载的空间摆动。
- 状态与控制约束。受制于物理约束,台车运行速度/加速度、摆角幅值、控制输入等必须保持在特定范围内。如何在状态与控制受限的情况下实现高性能控制,极具挑战。
研究成果
- 提出了多种轨迹规划算法及非线性控制方法,大幅提高了桥式吊车系统的控制性能与工作效率
- 搭建了3代实验样机平台,联合天津起重设备有限公司搭建了一台32吨级自动工业吊车
- 在Automatica、IEEE Transactions上发表高水平学术论文10余篇。获2016年中国自动化学会优秀博士论文奖、2017年吴文俊人工智能自然科学一等奖、2017年天津市专利奖-金奖、2018年中国高校科技成果交易会“优秀项目展示奖”、2013年关肇直奖提名奖等奖励
- 注重理论与实践相结合,在吊车控制应用方面,相比当前主流的闭环反馈控制方法,提出的基于相平面几何分析的轨迹规划控制技术(经国家起重运输机械质量监督检验中心检测)可使运送效率提高77%以上,在行程6米时,最大定位误差不超过5毫米,摆角不超过1度
实验视频
https://www.bilibili.com/video/av24521280/ https://www.bilibili.com/video/av24521390/
https://www.bilibili.com/video/av24521503/ https://www.bilibili.com/video/av24521635/
代表性论文
- N. Sun, et al., A new antiswing control method for underactuated cranes with unmodeled uncertainties: Theoretical design and hardware experiments, IEEE Transactions on Industrial Electronics, 2015年. (SCI一区,中科院top)
- N. Sun, et al., New energy analytical results for the regulation of underactuated overhead cranes: An end-effector motion-based approach, IEEE Transactions on Industrial Electronics, 2012年. (SCI一区,中科院top)
- N. Sun, et al., Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: Design and experiments, IEEE/ASME Transactions on Mechatronics, 2015年. (SCI二区,中科院top)
- N. Sun, et al., Nonlinear tracking control of underactuated cranes with load transferring and lowering: Theory and experimentation, Automatica, 2014年. (SCI二区,中科院top)
- N. Sun, et al., Energy coupling output feedback control of 4-DOF underactuated cranes with saturated inputs, Automatica, 2013年. (SCI二区,中科院top)
- N. Sun, et al., A novel kinematic coupling-based trajectory planning method for overhead cranes, IEEE/ASME Transactions on Mechatronics, 2012年. (SCI二区,中科院top)
- X. Zhang, Y. Fang, N. Sun, Minimum-time trajectory planning for underactuated overhead crane systems with state and control constraints, IEEE Transactions on Industrial Electronics, 2014年. (SCI一区,中科院top)
- H. Chen, Y. Fang, N. Sun, A swing constraint guaranteed MPC algorithm for underactuated overhead cranes, IEEE/ASME Transactions on Mechatronics, 2016年. (SCI二区,中科院top)
- N. Sun, et al., A continuous robust antiswing tracking control scheme for underactuated crane systems with experimental verification, ASME Journal of Dynamic Systems, Measurement, and Control, 2016年. (SCI四区)
- Y. Wu, N. Sun, et al., Nonlinear time-optimal trajectory planning for varying-rope-length overhead cranes, Assembly Automation, 2018年. (SCI四区)
- 孙宁, 等. 欠驱动三维桥式吊车系统自适应跟踪控制器设计. 自动化学报, 2010年
专利成果
- 孙宁,方勇纯,陈鹤,欠驱动吊车自适应消摆定位控制方法,中国发明专利,专利号:ZL201410649866.5,授权,授权日:2016.8.24
- 方勇纯,孙宁,张一淳,基于轨迹在线规划的桥式吊车高效消摆控制方法,中国发明专利,专利号:ZL201210292959.8,授权,授权日:2014.5.7
- 方勇纯,许鹏,孙宁,屈金山,基于远程遥操作的桥式吊车自动控制系统,中国发明专利,专利号: ZL201611158901.9,授权,授权日:2017.11.17
- 方勇纯,陈鹤,孙宁,面向台车停车与负载消摆的桥式吊车紧急制动方法,中国发明专利,专利号:ZL201610159957.X,授权,授权日:2017.4.19
- 方勇纯,卢彪,孙宁,基于滑模面的桥式吊车控制方法,中国发明专利,专利号: ZL201610705306.6,授权,授权日:2017.12.5
- 方勇纯,苑英海,王鹏程,刘笑含,孙宁,基于立体视觉的吊车避障系统,中国发明专利,专利号:ZL201110052073.1,授权,授权日:2012.9.5