就目前而言,几乎所有研究人员在分析桥式吊车系统时,都忽略吊钩的质量,或把吊钩与负载视为同一质点,即将系统的动力学简化为单级摆动吊车。而事实上,在很多情况下,当台车运行时,吊钩会绕台车产生第一级摆动,货物则将相对于吊钩产生第二级摆动,即整个吊车系统会呈现出显著的两级摆动。
两级摆动特性的出现导致整个系统的自由度个数增加,在控制量维数不变的情况下,增加了吊车系统的欠驱动程度,增强了系统状态之间的耦合度,因而进一步加剧了非线性特性。如果不能充分考虑两级摆动特性的影响,在系统呈现出两级摆动时将无法取得良好的控制效果,严重时甚至导致闭环系统不稳定。
因此,深入探讨两级摆动的动态特性对吊车系统的影响,并以此为基础,开发高性能运动规划及消摆定位控制方法以提高系统的工作效率与安全性能,具有非常重要的研究价值。
研究挑战
两级摆动特性的出现导致整个系统的自由度个数增加,在控制量维数不变的情况下,增加了吊车系统的欠驱动程度,增强了系统状态之间的耦合度,因而进一步加剧了非线性特性。如果不能充分考虑两级摆动特性的影响,在系统呈现出两级摆动时将无法取得良好的控制效果,严重时甚至导致闭环系统不稳定。因此,深入探讨两级摆动的动态特性对吊车系统的影响,并以此为基础,开发高性能运动规划及消摆定位控制方法以提高系统的工作效率与安全性能,具有非常重要的研究价值。
研究成果
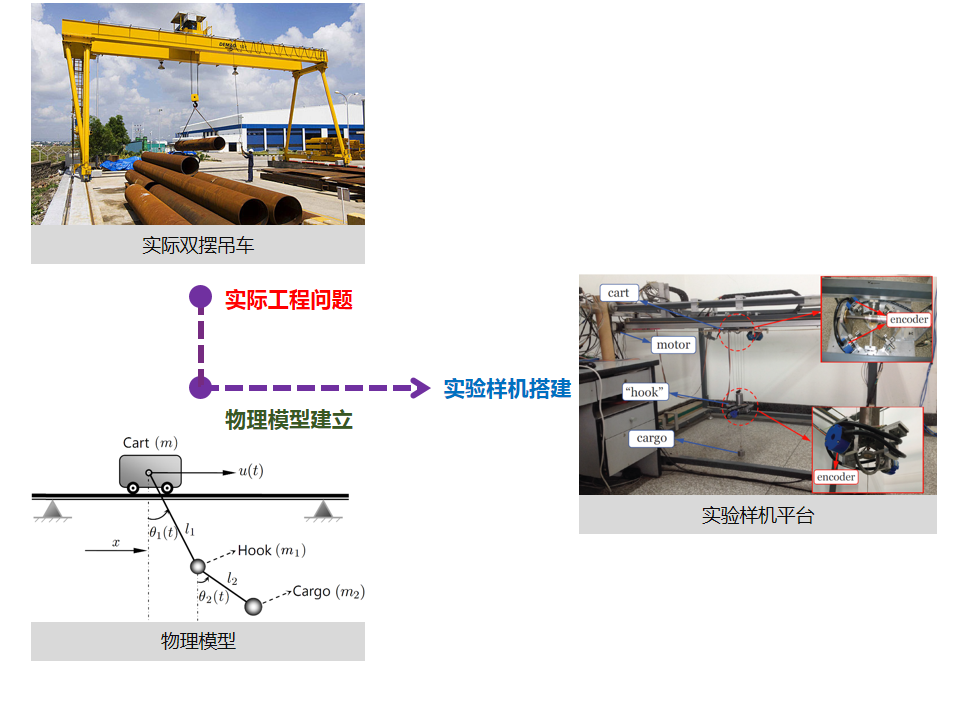
- 从工程角度出发,通过问题提炼,建立了双摆桥式吊车系统的非线性完整动力学模型,并搭建了实验样机平台
- 针对双摆效应,提出了若干种方法,大幅提高了系统的工作效率,在此基础上,发表了数篇IEEE Transactions论文,授权发明专利1项,相关成果获2016年第31届中国自动化学会青年学术年会最佳论文(应用)奖
实验视频
https://www.bilibili.com/video/BV1uo4y117gt/ https://www.bilibili.com/video/BV1CK4y1G7PX/
https://www.bilibili.com/video/BV125411u7eb/
代表性论文
- N. Sun, et al., An energy-optimal solution for transportation control of cranes with double pendulum dynamics: Design and experiments, Mechanical Systems and Signal Processing, 2018年. (SCI一区,中科院top) [入选爱思唯尔献礼南开大学百年校庆推出的《南开大学优秀论文合辑》(全球被引次数前1%的高被引论文),本领域唯一一篇;入选对“卓越工程”有突出贡献的科学论文]
- N. Sun, et al., Transportation control of double-pendulum cranes with a nonlinear quasi-PID scheme: Design and experiments, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019年. (SCI一区,中科院TOP) [同时入选ESI热点+高被引论文]
- N. Sun, et al., Amplitude-saturated nonlinear output feedback antiswing control for underactuated cranes with double-pendulum cargo dynamics, IEEE Transactions on Industrial Electronics, 2017年. (SCI一区,中科院TOP) [同时入选ESI热点+高被引论文]
- N. Sun, et al., Nonlinear antiswing control for crane systems with double-pendulum swing effects and uncertain parameters: Design and experiments, IEEE Transactions on Automation Science and Engineering, 2018年. (SCI二区) [入选ESI高被引论文]
- 孙宁, 等. 带有状态约束的双摆效应吊车轨迹规划. 控制理论与应用, 2014年. [“关肇直奖”20周年专辑邀请稿]
- 孙宁, 等. 一种双摆效应桥式吊车光滑鲁棒控制方法. 振动与冲击, 2019年.
专利成果
- 孙宁,吴易鸣,方勇纯,陈鹤,双摆吊车能耗最优轨迹规划方法,中国发明专利,专利号,ZL201710259680.2,授权,授权日:2018.7.17
- 方勇纯,陈鹤,孙宁,基于伪谱法的双摆吊车全局时间最优轨迹规划方法,中国发明专利,专利号: ZL201510624100.6,授权,授权日:2017.3.29