由于具有灵活度高、结构简单、体积小等优点,平衡机器人在很多领域发挥着重要作用,如货物搬运、家庭服务等,同时它也被应用于教育、科研等领域,其控制研究已成为当前机器人领域的重要方向之一。
平衡机器人是一种典型的欠驱动、强非线性、本征不稳定系统,其自动控制算法的设计与分析具有诸多挑战。尤其是当它们在很多情况下运行在非平坦的路面上,导致系统的动力学特性更加复杂。因此,针对平衡机器人的自动控制研究,具有理论与实际的双重意义。
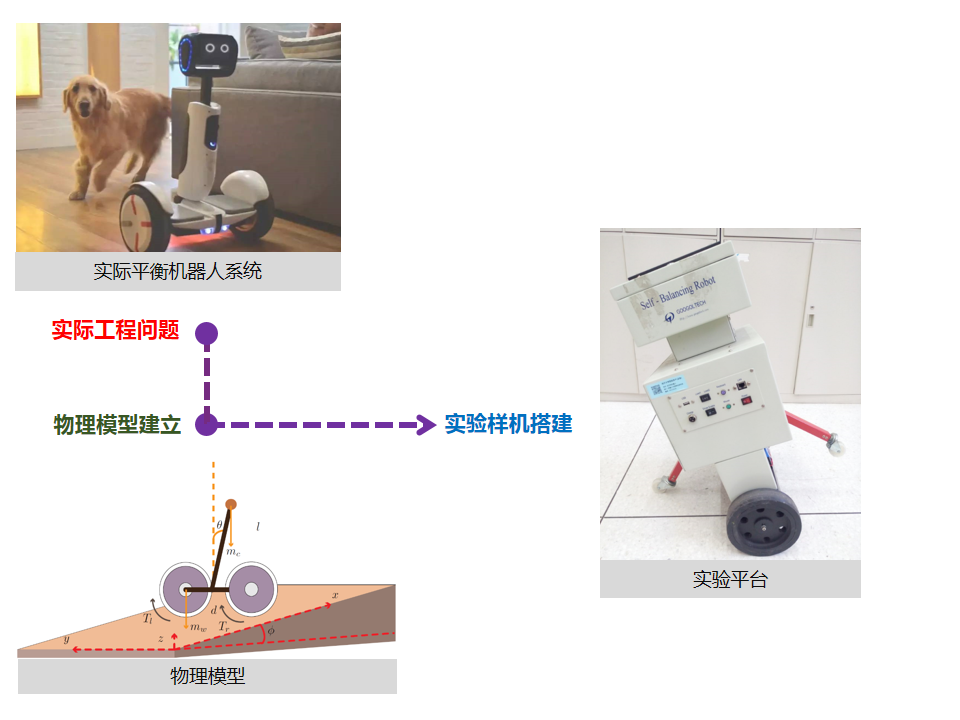
研究成果
- 建立了自平衡机器人系统的在斜面、起伏路面上的非线性动力学模型。实验室拥有 Googol Gbot2001平衡机器人一台
- 提出了多种轨迹规划、非线性控制方法,可实现平衡机器人的快速定位、跟踪及平衡控制
- 部分实验结果见下面视频
实验视频
https://www.bilibili.com/video/av24521002/
代表性论文
- T. Yang, N. Sun, et al., Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments, IEEE Transactions on Cybernetics, 2021年. (SCI一区,中科院TOP,人工智能领域的顶级学术期刊)
- D. Liang, N. Sun, et al., Trajectory planning-based control of underactuated wheeled inverted pendulum robots, SCIENCE CHINA Information Sciences, 2019年.